
Description
Product Model Numbers
| Model Numbers | ||||
|---|---|---|---|---|
| NT60 | NT86 | IR60 | EPR60 | EPR86 |
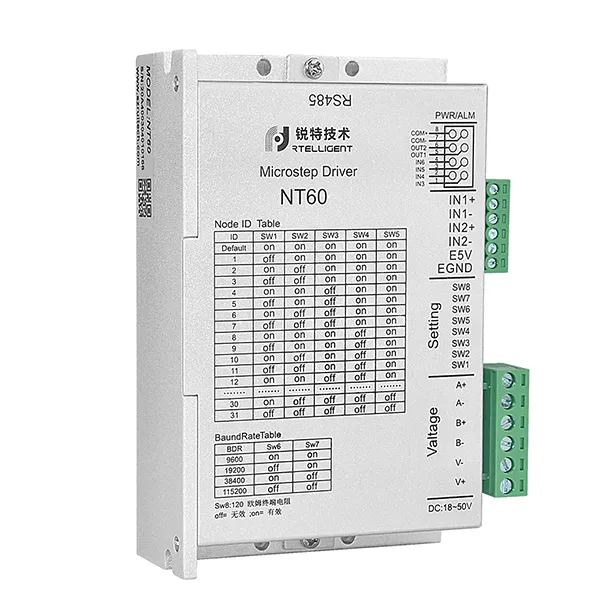
Technical Specifications
| Model | Peak Current (A) | Weight (Kg) | Power Voltage | Dimensions (mm) | Communication Mode | Maximum Baud Rate | Matching Motor |
|---|---|---|---|---|---|---|---|
| NT60 | 6 | 0.3 | 18-50 VDC | 118*76*33 | RS-485 | 115200 | Open loop or closed loop below 60 mm |
| NT86 | 8 | 0.6 | 18-80 VAC | 151*97*52 | RS-485 | 115200 | Open loop or closed loop below 86 mm. |
| NT110 | 8 | 0.7 | 230VAC | 151*97*52 | RS-485 | 115200 | Open loop or Closed loop for 110mm, 3-phase |
| EPR60 | 6 | 0.4 | 18-50 VDC | 134*82*29 | TCP/IP | 10M/100M | Open loop below 60 mm |
| EPT60 | 6 | 0.4 | 18-50 VDC | 134*82*29 | TCP/IP | 10M/100M | Closed loop below 60 mm |
| EPR86 | 8 | 0.7 | 18-80 VAC | 139.6*97.5*35 | TCP/IP | 10M/100M | Open loop below 60 mm |
| EPT86 | 8 | 0.7 | 18-80 VAC | 139.6*97.5*35 | TCP/IP | 10M/100M | Closed loop below 60 mm |
| ECR42 | 2.5 | 0.4 | 18-80VDC | 134*82*29 | EtherCAT | 100M | Open loop below 42 mm |
| ECR60 | 6 | 0.4 | 18-80VDC | 134*82*29 | EtherCAT | 100M | Open loop below 60 mm |
| ECR86 | 7.2 | 0.6 | 18-80VAC | 151*97*35 | EtherCAT | 100M | Open loop below 86 mm |
| ECT42 | 3 | 0.4 | 18-80VDC | 134*82*29 | EtherCAT | 100M | Closed loop below 42 mm |
| ECT60 | 6.2 | 0.4 | 18-80VDC | 134*82*29 | EtherCAT | 100M | Closed loop below 60 mm |
| ECT86 | 7.2 | 0.6 | 18-80VAC | 151*97*35 | EtherCAT | 100M | Closed loop below 86 mm |
| ECR60X2 | 6 | 0.5 | 18-80VDC | 175*98*33 | EtherCAT | 100M | Open loop below 60 mm |
| ECR86X2 | 6 | 0.5 | 18-80VDC | 175*98*33 | EtherCAT | 100M | Open loop below 86 mm |



Reviews
There are no reviews yet.